About
The ONCE dataset is a large-scale autonomous driving dataset with 2D&3D object annotations.
• 1 Million LiDAR frames, 7 Million camera images
• 200 km² driving regions, 144 driving hours
• 15k fully annotated scenes with 5 classes (Car, Bus, Truck, Pedestrian, Cyclist)
• Diverse environments (day/night, sunny/rainy, urban/suburban areas)
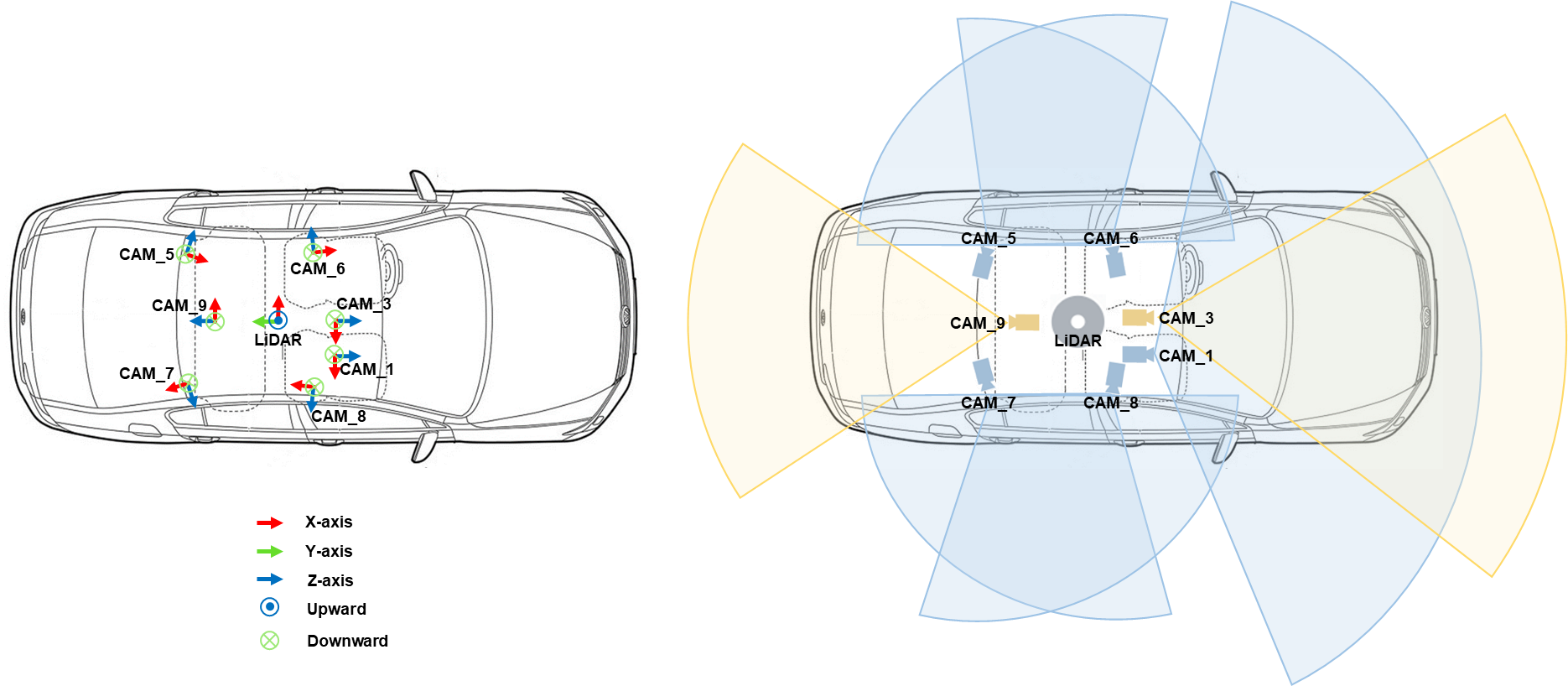
Sensors
The data acquisition vehicle is equipped with one 40-beam LiDAR on the top and seven cameras.
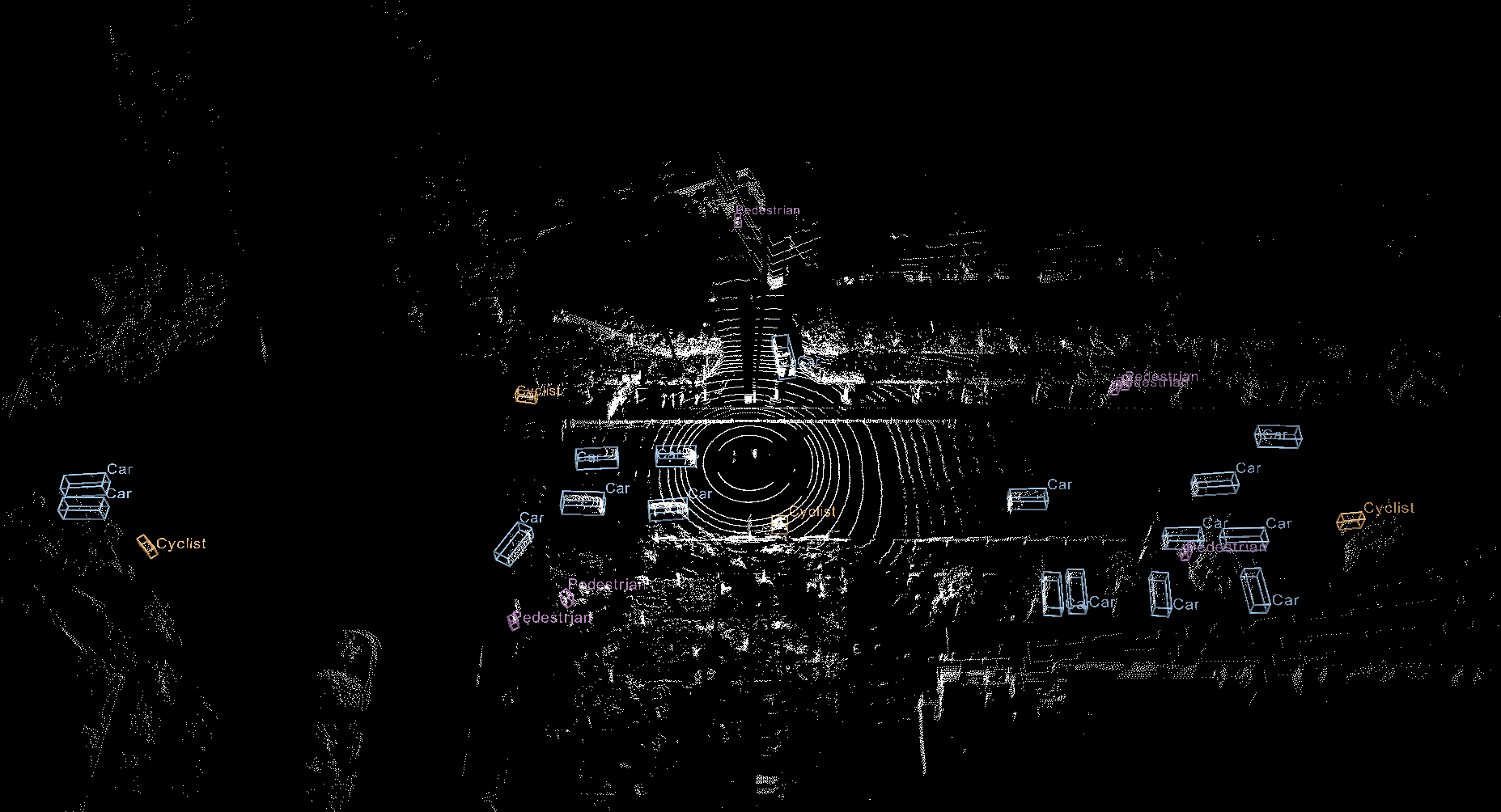
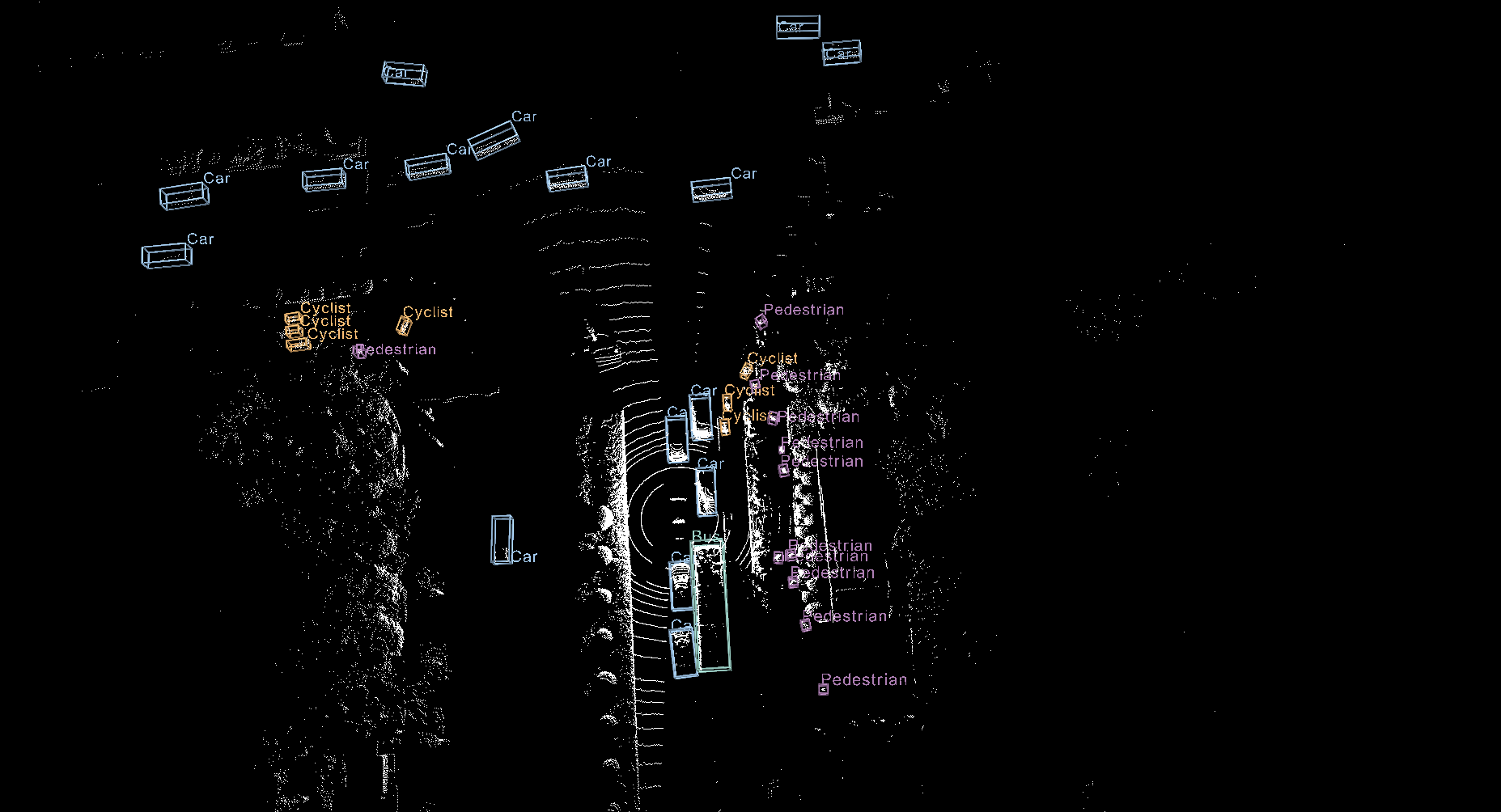
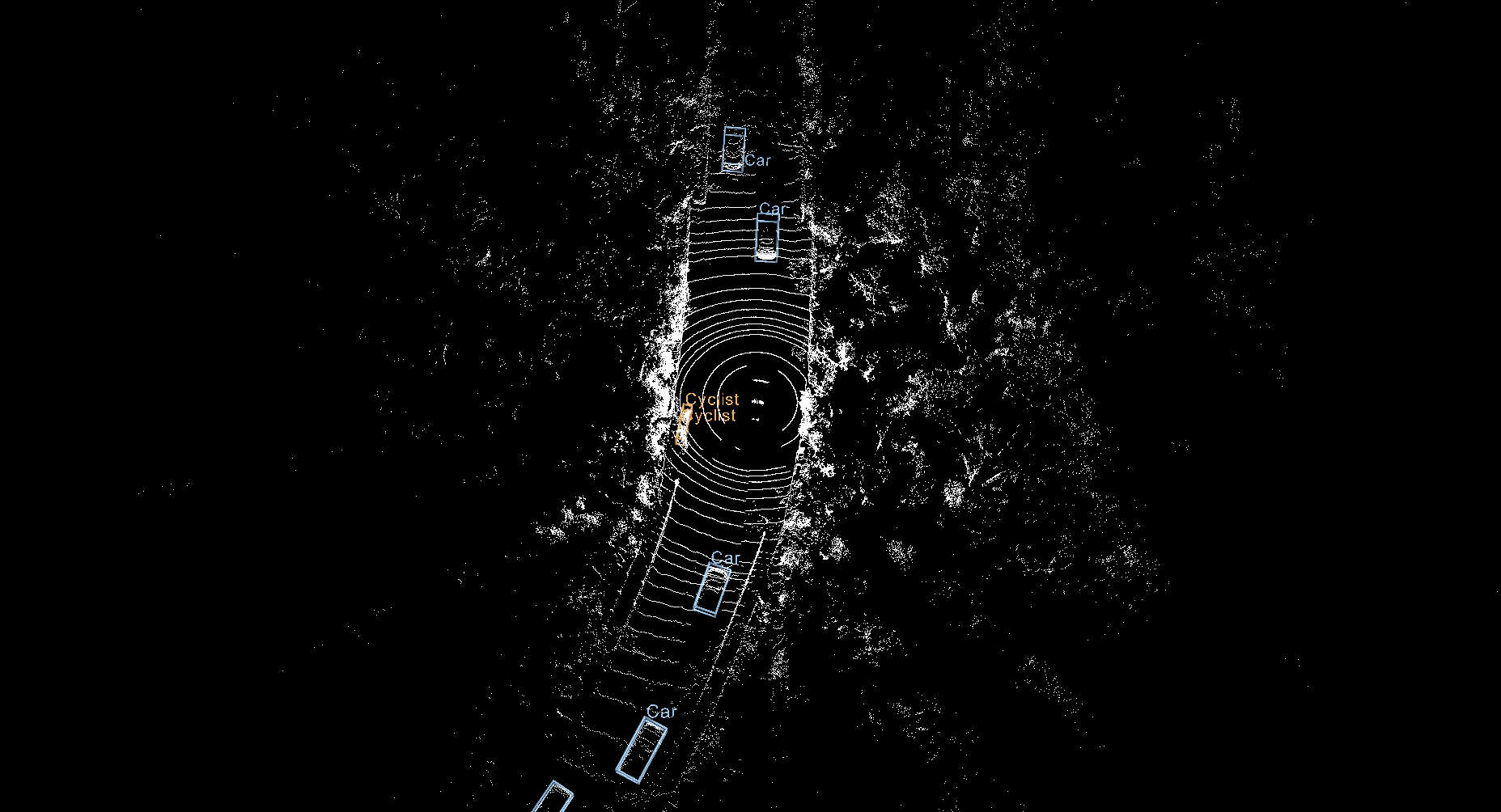
Examples



Annoucement
2021/05/18 Initial release.
2021/06/30 Dataset toolkit release.
2021/07/01 The challenge website has been released at CodaLab.
2021/07/14 Data download links have been updated.
2021/08/05 Calibration data updated, all info files should re-download.
Our paper is accepted to NeurIPS 2021 datasets track
We successfully hold the 3D object detection challenge for ICCV 2021 SSLAD Workshop
2022/03/28 New annotation on 3D lanes with ONCE dataset are available on ONCE-3Dlanes
2023/02/28 New test leaderboard update due to codalab site update codalab
Citation
If you find this dataset useful, please cite the following paper:
@inproceedings{mao2021one,
title={One Million Scenes for Autonomous Driving: ONCE Dataset},
author={Mao, Jiageng and Niu, Minzhe and Jiang, Chenhan and Liang, Xiaodan and Li, Yamin and Ye, Chaoqiang and Zhang, Wei and Li, Zhenguo and Yu, Jie and Xu, Chunjing and others},
journal={arXiv preprint arXiv:2106.11037},
year={2021}
}
Organization
Huawei Corporation.